



Kategorie Innovation & Technologie - 8. Januar 2018
Eine feinfühlige Haut für den Roboterarm
Klagenfurt – Der Roboter greift nach dem Werkstück und präsentiert es seinem menschlichen Mitarbeiter, der es prüft, verschraubt oder mit weiteren Komponenten verbindet. Nach diesem oder einem ähnlichen Prinzip könnte in Zukunft die Zusammenarbeit zwischen Mensch und Maschine ablaufen. Oberstes Gebot bei dieser „kollaborativen Robotik“ ist die Sicherheit des Menschen. Der Roboterarm darf sein Gegenüber keinesfalls mit unkoordinierten Bewegungen verletzen.
Entwickler haben mehrere Möglichkeiten, dem Roboter die nötige Umsicht zu verleihen: Einerseits wird mit interner Sensorik die Kraft gemessen, die auf den Roboterarm einwirkt, wenn er gegen einen Körper stößt. Andererseits generiert ein Kamerasystem oder Laserscanner ein Abbild der Umgebung, das zur Grundlage von Interaktionen wird.
Robotiker der Forschungsgesellschaft Joanneum Research und der Alpen-Adria-Universität Klagenfurt sind dabei, eine weitere Sensortechnologie zu entwickeln, die das unmittelbare Umfeld des Roboters besser kontrolliert: eine sogenannte „kapazitive Sensorhaut“, die an der Maschine angebracht ist und Menschen und Objekte im Umkreis von etwa 20 Zentimetern erkennt; sie soll dem Roboter die Gabe verleihen, natürlich wirkende Bewegungen zu vollziehen und vor einer Kollision oder Interaktion mit Menschen rechtzeitig abzubremsen.
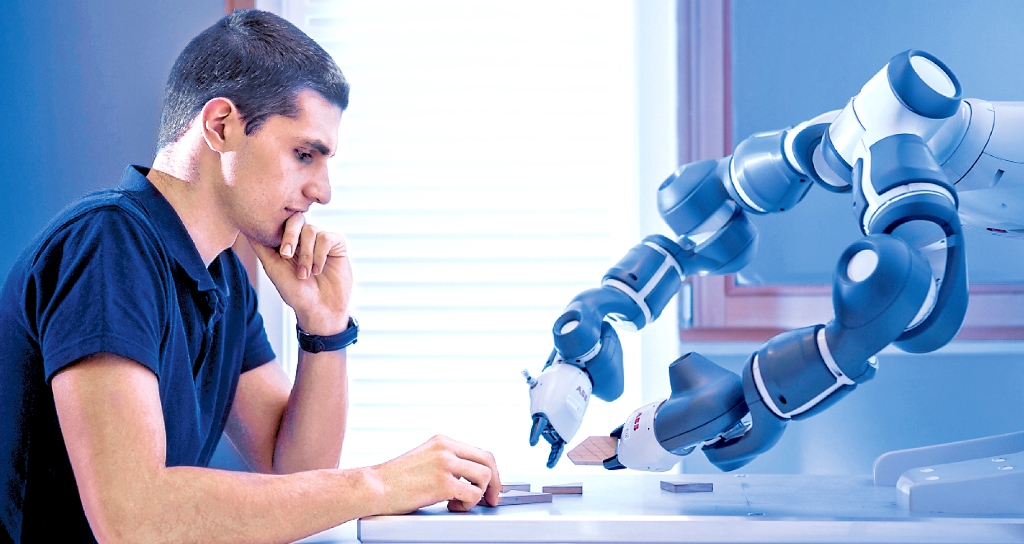
© Joanneum Research
Smartphone-Technik
„Mit der Sensorhaut schließt sich die Lücke zwischen Laserscanner für größere Entfernungen und der Interaktionserfassung bei Berührung oder Kollision“, betont Michael Hofbaur, Leiter des Instituts für Robotik und Mechatronik bei Joanneum Research am Lakeside Science & Technology Park in Klagenfurt. Die Entwicklung funktioniert ähnlich einem berührungssensitiven Smartphone-Display: „Die Sensorhaut besteht aus einer Folie, an der Elektroden angebracht sind. Sie erzeugen ein elektrisches Feld, das durch die Annäherung verzerrt wird. Aus der Verzerrung wird die Position des Objekts errechnet“, sagt Hofbaur.
Die Kärntner Forscher haben der Technologie eine besonders hohe Ortsauflösung verliehen. „Die Sensorhaut erkennt, welcher Teil des Roboters sich dem Menschen annähert. Erfasst man dabei laufend Veränderungen, lässt sich auch die Annäherungsgeschwindigkeit errechnen“, sagt Hofbaur. Zudem soll das System mit zunehmender Rechenleistung lernen, Objekte in ihrer 3D-Form zu erfassen. „Damit könnte eine Roboterhand die Plastizität aufgenommener Gegenstände besser verstehen“, gibt Hofbaur ein Beispiel.
Die Sensorik muss einerseits Sicherheit garantieren und im Zweifelsfall einen Stopp einleiten. Andererseits werden die zu einem Umgebungsabbild fusionierten Sensordaten mithilfe von Artificial-Intelligence-Systemen ausgewertet, um die Umgebung interpretieren und Kontexte „verstehen“ zu können. „Es kann notwendig sein, dass der Roboter, dessen Weg durch einen Menschen blockiert ist, nicht nur einen Notstopp einleitet, sondern auch darauf achtet, dass der Weg zum Verbandskasten nicht verstellt wird“, veranschaulicht der Forscher.
Nahtlose Kommunikation
Soll die Kooperation funktionieren, muss der Roboter erwünschte und unerwünschte Kontakte unterscheiden lernen. Dafür benötigt er ein Konzept der zu verrichtenden Tätigkeit. Zudem muss die Kommunikation zwischen Mensch und Maschine funktionieren. „In einem Versuch haben wir die Maschine den Blick des menschlichen Gegenübers erfassen lassen“, erklärt Hofbaur. „Damit kann der Roboter vorausahnen, was der Mensch als Nächstes machen will.“
Die Sensorhaut soll auch gleich bei einem weiteren Projekt von Joanneum Research zum Einsatz kommen, beim Roboter Chimera. Bestehend aus einem sensitiven Roboterarm und einem autonomen Transportsystem soll er vielerlei Tätigkeiten im Industrieumfeld erledigen können. Chimera könnte beispielsweise Regale mit Bauteilen rund um einen Arbeitsplatz eines Industriearbeiters in der Nacht neu bestücken.
Genauso soll Chimera aber auch eine direkte Zusammenarbeit mit Menschen möglich machen. In einem derartigen Ansatz wachsen die ehemals getrennten Bereiche von Industrie- und Servicerobotern zusammen. Hofbaur: „Der Einsatz der Roboter ist künftig beispielsweise auch in Großküchen denkbar und – sobald leistbar – auch im Endverbraucherbereich, etwa als Haushaltsroboter, der Kinderzimmer aufräumt.“ (pum, 21.12.2017)